آموزش تصویری ساخت ربات جنگجو
در ادامه مراحل ساخت ربات جنگجو را به صورت تصویری آموزش می دهیم و مراحل ساخت را در صورت نیاز توضیح خواهیم داد .
چند نکته مهم :
تعادل مهمترین نکته ایست که سازنده ربات جنگجو میبایست به آن توجه نماید .
برای ایجاد تعادل قرینه را در ربات خود رعایت نمایید .
وزن ربات ؛ شاخص مهم دیگر در ربات است . وزن ربات نباید آنقدر زیاد باشد که از توان موتور ها برای جابجایی ربات خارج باشد و نباید انقدر سبک باشد که نتواند ربات حریف را جابجا کند .
وزن ایده ال پس از تست ها و آزمایش ربات بدست می آید .
بین وزن و تعداد موتورها ارتباط مستقیم وجود دارد . بهتر است وزن ربات یا به صورت قرینه و یا به مرکز ربات وارد شود .
و اما مهمترین عامل در برتری در مسابقات ربات جنگجو مهارت و قدرت کنترل بهتر ربات توسط اپراتور می باشد که با تمرین و تکرار و همچنین تمرکز در روز مسابقه حاصل می شود .
گام اول :
طراحی شاسی ربات
شاسی مهمترین قسمت ربات است که موتور و گیربکس ها و بدنه ربات به آن وصل می شوند
اندازه شاسی بستگی به تعداد چرخ ها دارد که حداقل اندازه 10 * 10 و حداکثر 25 * 20 سانتی متر می باشد .
اندازه ایده ال :
برای ربات شش چرخ (هر طرف سه چرخ ) : 15 * 15
برای ربات هشت چرخ (هر طرف چهار چرخ ) : 25 * 14
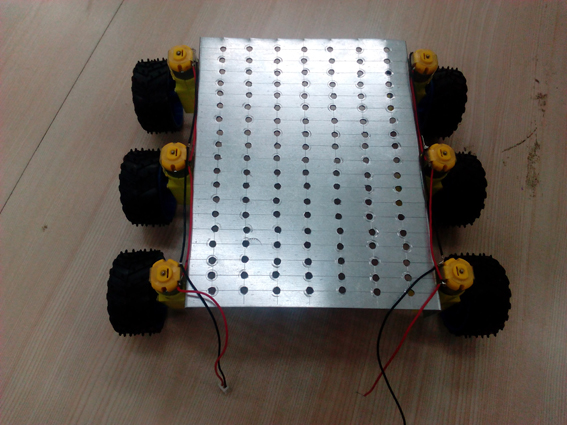

گام دوم :
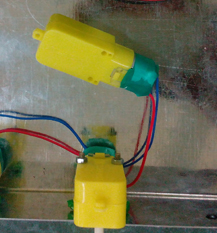
نصب گیربکس و چرخ ها
نکته مهم :
قرارگرفتن همه چرخ ها در یک راستا ( همه چرخ ها روی زمین قرار بگیرند )
شاسی باید طوری برای نصب گیربکس سوراخ کاری شود که گیربکس ها در یک راستا باشند و در نهایت همه چرخ ها در یک راستا و روی زمین قرار گیرند

قبل از سوراخ کاری با یک میخ فولادی و چکش جای سوراخ را علامت گذاری نمایید

نکته خیلی مهم :
موقع پیچ کردن گیربکس نباید مهره را بیش از حد سفت کرد زیرا در صورت سفت کردن زیاد چرخ دنده ها در گیربکس قفل خواهد شد و کارایی گیربکس به شدت پایین می اید و احتمال اسیب دیدن ان افزایش می یابد .
گام سوم :
برق کاری موتور ها
نکته :
ولتاز کاری این ربات بین 6 تا 12 ولت میباشد لذا دانش آموزان عزیز از اتصال ربات به برق با ولتاژ بالاتر جدا خودداری کنند .
میتوان از باطری - ادابتور - شارژر موبایل با آمپر بالا جهت منبع تغذیه استفاده نمود .
روش سیم کشی :
جهت موازی کردن موتور ها همه انها را کنار هم و به یک سمت گذاشته و سپس سمت راست موتور ها را به وسیله سیم مناسب به هم وصل نمایید سپس سمت دیگر موتور ها را به کمک سیم دیگر با رنگی دیگر به هم وصل نمایید .
( سمت راست موتورها را به یکدیگر و سمت چپ موتور ها را به یکدیگر وصل کنید . )
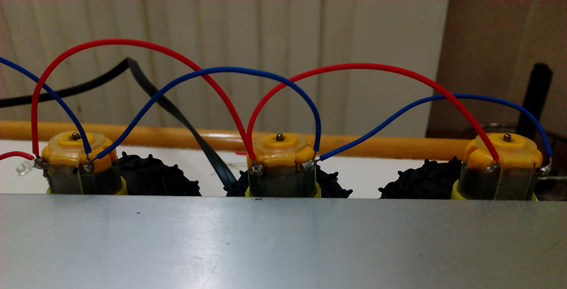

سپس موتور ها را با چسب برق عایق کاری کنید .
سپس دو موتور آخر هرسمت را جدا گانه به دسته کنترل ربات متصل نمایید
گام چهارم :
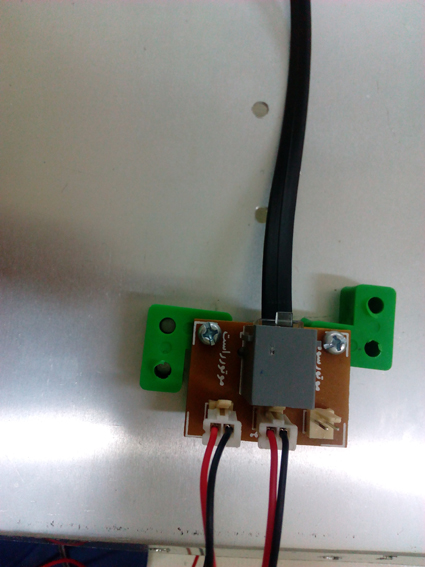
نصب دسته کنترل
سیم دسته کنترل مثل سیم تلفن دارای یک سوکت است که باید دوتکه دسته کنترل را به وسیله ان به هم وصل نمود
بر روی دسته کنترل یک پین مخابراتی است که می بایست به منبع تغذیه( برق 6 تا 12 ولت ) ربات وصل شود .

نکته مهم :
در نصب قطعه کوچکتر دسته کنترل بر روی بدنه فلزی حتما از یک عایق بین این قسمت و بدنه فلزی استفاده نمایید تا از اتصالی جلوگیری شود .

گام پنجم :
طراحی ظاهر و بدنه ربات
در طراحی بدنه ربات بهتر است از سطح شیب دار استفاده نمود البته سطح صاف نیز کارایی خوبی دارد .

گام ششم :
نصب آنتن
جهت نیفتادن سیم کنترل ربات بر روی زمین و عدم اخلال در کار ربات به کمک سازه های پلاستیکی یک انتن 20 سانتی متری بر روی ظاهر ربات ساخته شود و سیم کنترل به آن محکم شود .
گام هفتم :
تمرین کنترل ربات
پس از راه اندازی ربات جهت افزایش مهارت کنترل ربات دانش آموزان با ربات خود تمرین کنند و در صورت امکان در زمین مسابقه مهارت خود در کنترل ربات را افزایش دهند
همانطور که قبلا هم بیان شد مهارت کنترل ربات نقش تعیین کننده ای خواهد داشت
موفق باشید
نوشته شده توسط : مهندس محکم خواه مدرس رباتیک
